Maciej K. Wozniak

LV24, KTH-RPL
Stockholm, Sweden
I am a Ph.D. student supervised by Patric Jensfelt and André Pereira. My doctoral studies are supported by the Wallenberg AI, Autonomous Systems and Software Program (WASP).
I am working on projects focused on 3D computer vision solutions for robots perception and dynamic environment understanding. I also create VR/AR applications for improving human interaction with indoor and outdoor robots.
news
| Aug 11, 2025 | CleverDistiller was accepted to BMVC 25 (~25% acceptance rate). |
|---|---|
| May 1, 2025 | I gave a talk on ‘‘Self – supervised learning for autonomous driving perception’’ to different teams at Qualcomm, zenseact and Scania! Slides available here. |
| Mar 31, 2025 | Check out CleverDistiller our work on distilling camera VFM to LiDAR networks! |
| Mar 1, 2025 | I defended 50% of my PhD. Thanks Holger Caesar for great discussion! |
| Oct 1, 2024 | Our work on VFM for Autonomous Driving (S3PT) accepted to WACV as Oral presentation |
| Sep 1, 2024 | UADA accepted to RA-L ‘24Unsupervised Adversarial Domain Adaptaion for 3D Object Detection (UADA3D). |
| Jun 1, 2024 | I started an internship at Qualcomm on Multimodal Self-Supervised Learning for Autonomous Driving Perception. |
| Feb 1, 2024 | Check our project on Unsupervised Adversarial Domain Adaptaion for 3D Object Detection (UADA3D). |
| Jan 8, 2024 | Happy to announce that I was chosen as ACM/IEEE HRI Pioneer! See you in Boulder in March! |
| Dec 27, 2023 | Check our VAM-HRI workshop! |
| Dec 1, 2023 | I participed and gave a presentation during WARA M&L days in Are! |
selected publications
-
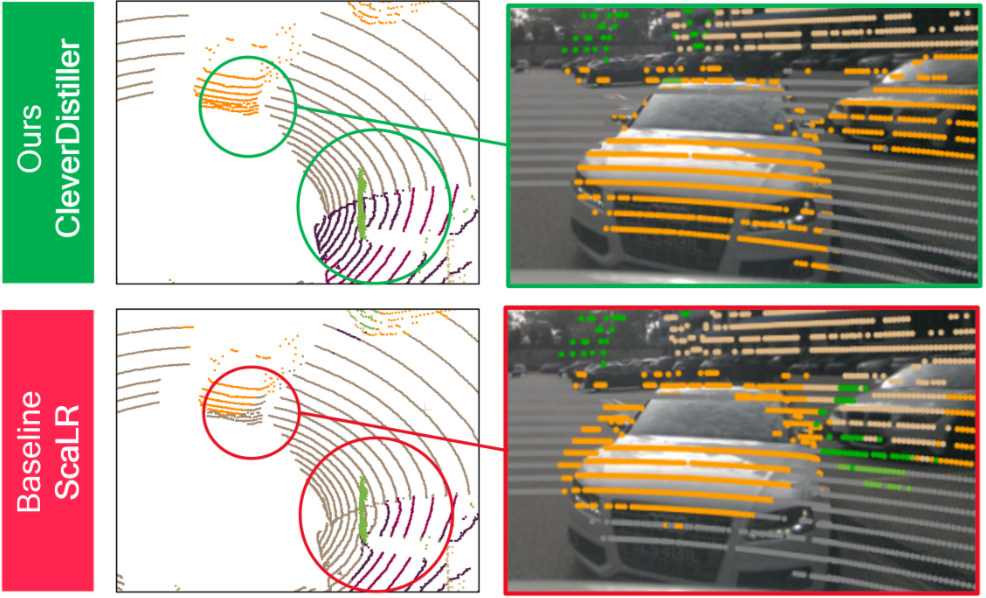 CleverDistiller: Simple and Spatially Consistent Cross-modal DistillationarXiv preprint arXiv:2503.09878, 2025
CleverDistiller: Simple and Spatially Consistent Cross-modal DistillationarXiv preprint arXiv:2503.09878, 2025 - HRITake a Chance on Me: How Robot Performance and Risk Behaviour Affects Trust and Risk-takingIn Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction, 2025
- WACVS3PT: Scene Semantics and Structure Guided Clustering to Boost Self-Supervised Pre-Training for Autonomous DrivingarXiv preprint arXiv:2410.23085, 2025
- RA-LUada3d: Unsupervised adversarial domain adaptation for 3d object detection with sparse lidar and large domain gapsIEEE Robotics and Automation Letters, 2024
- CVPRMcd: Diverse large-scale multi-campus dataset for robot perceptionIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024
- RA-LTowards a Robust Sensor Fusion Step for 3D Object Detection on Corrupted DataIEEE Robotics and Automation Letters, 2023
- HumanoidsA Virtual Reality Framework for Human-Robot Collaboration in Cloth FoldingIn 2023 IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023
- RO-MANHappily Error After: Framework Development and User Study for Correcting Robot Perception Errors in Virtual RealityIn IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2023
- ICARSCApplying 3D Object Detection from Self-Driving Cars to Mobile Robots: A Survey and ExperimentsIn 2023 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), 2023
- HRIWhat you see is (not) what you get: A vr framework for correcting robot errorsIn Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 2023
- HRIVirtual, augmented, and mixed reality for human-robot interaction (vam-hri)In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 2023
- ITSCSemantic 3d grid maps for autonomous drivingIn 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022
