Maciej K. Wozniak

LV24, KTH-RPL
Stockholm, Sweden
I am a Ph.D. student at KTH Royal Institute of Technology, supervised by Patric Jensfelt and André Pereira. My doctoral studies are supported by the Wallenberg AI, Autonomous Systems and Software Program (WASP).
My research focuses on 3D computer vision and deep learning for robot perception — including self-supervised pre-training, domain adaptation, and end-to-end autonomous driving. I also build VR/AR frameworks for human-robot interaction.
Find me on Google Scholar, GitHub, and LinkedIn.
news
| Aug 11, 2025 | CleverDistiller was accepted to BMVC 25 (~25% acceptance rate). |
|---|---|
| May 1, 2025 | I gave a talk on ‘‘Self – supervised learning for autonomous driving perception’’ to different teams at Qualcomm, zenseact and Scania! Slides available here. |
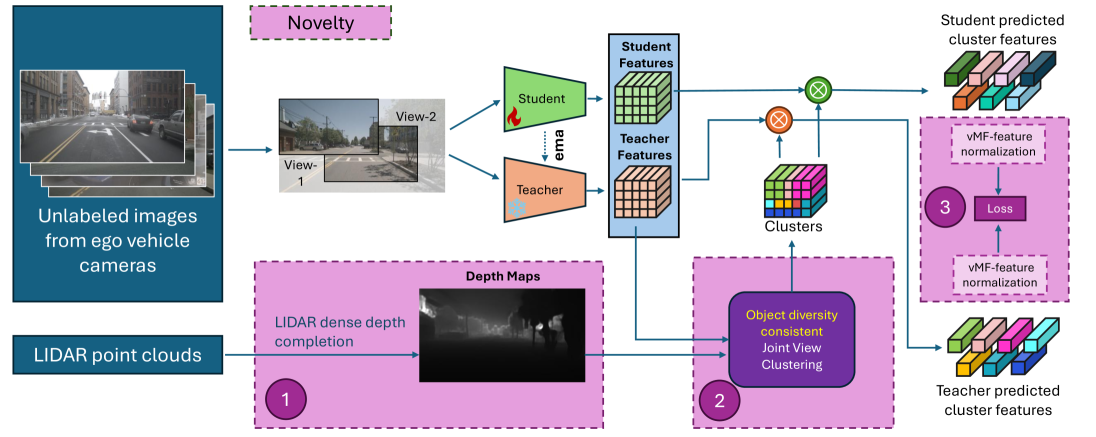
| Mar 31, 2025 | Check out CleverDistiller our work on distilling camera VFM to LiDAR networks! |
| Mar 1, 2025 | I defended 50% of my PhD. Thanks Holger Caesar for great discussion! |
| Oct 1, 2024 | Our work on VFM for Autonomous Driving (S3PT) accepted to WACV as Oral presentation |
| Sep 1, 2024 | UADA accepted to RA-L ‘24Unsupervised Adversarial Domain Adaptaion for 3D Object Detection (UADA3D). |
| Jun 1, 2024 | I started an internship at Qualcomm on Multimodal Self-Supervised Learning for Autonomous Driving Perception. |
| Feb 1, 2024 | Check our project on Unsupervised Adversarial Domain Adaptaion for 3D Object Detection (UADA3D). |
| Jan 8, 2024 | Happy to announce that I was chosen as ACM/IEEE HRI Pioneer! See you in Boulder in March! |
| Dec 27, 2023 | Check our VAM-HRI workshop! |
| Dec 1, 2023 | I participed and gave a presentation during WARA M&L days in Are! |
selected publications
-
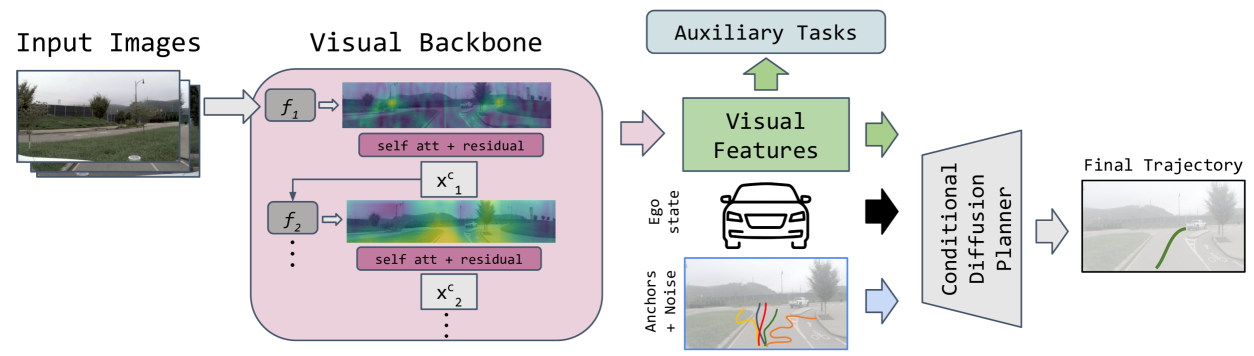 PRIX: Learning to Plan from Raw Pixels for End-to-End Autonomous DrivingIEEE Robotics and Automation Letters, 2025
PRIX: Learning to Plan from Raw Pixels for End-to-End Autonomous DrivingIEEE Robotics and Automation Letters, 2025 -
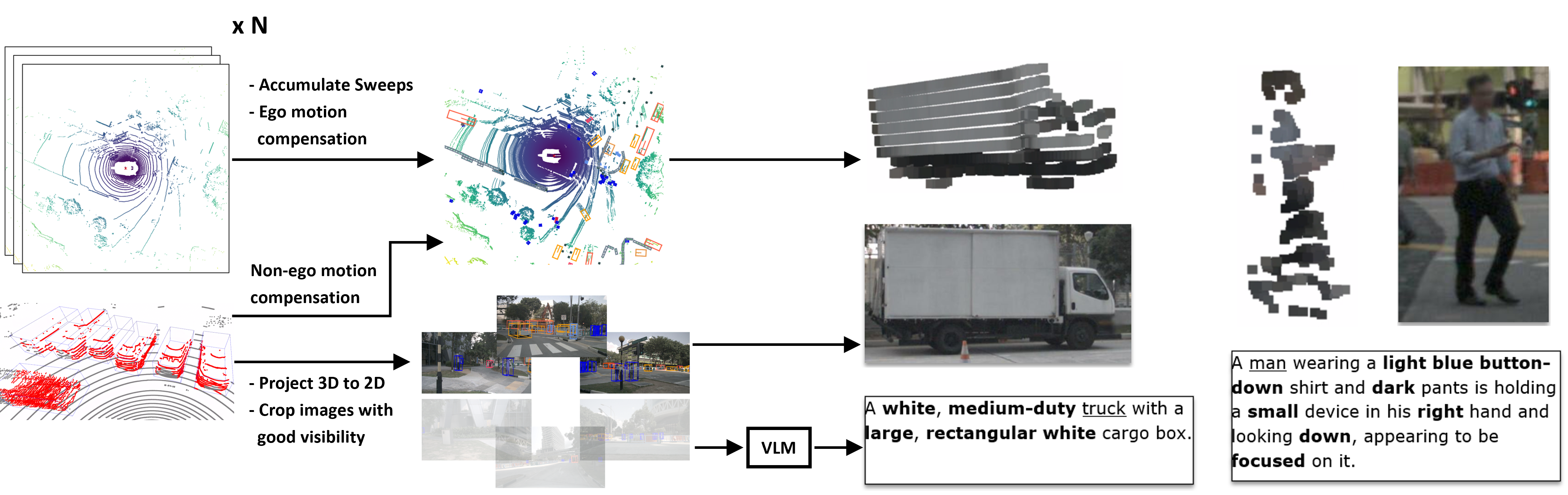 BlendCLIP: Bridging Synthetic and Real Domains for Zero-Shot 3D Object Classification with Multimodal PretrainingIn IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2026
BlendCLIP: Bridging Synthetic and Real Domains for Zero-Shot 3D Object Classification with Multimodal PretrainingIn IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2026 - HRIVirtual, Augmented, and Mixed Reality for Human-Robot Interaction Workshop (VAM-HRI)In Companion of the 2025 ACM/IEEE International Conference on Human-Robot Interaction, 2025
-
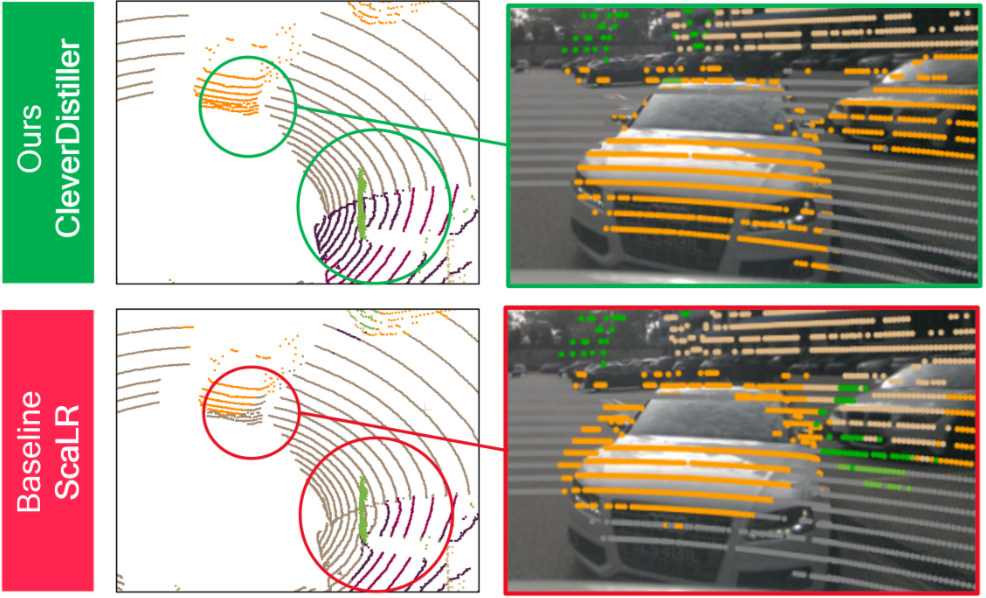 CleverDistiller: Simple and Spatially Consistent Cross-modal DistillationIn British Machine Vision Conference (BMVC), 2025
CleverDistiller: Simple and Spatially Consistent Cross-modal DistillationIn British Machine Vision Conference (BMVC), 2025 - HRITake a Chance on Me: How Robot Performance and Risk Behaviour Affects Trust and Risk-takingIn Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction, 2025
-
 S3PT: Scene Semantics and Structure Guided Clustering to Boost Self-Supervised Pre-Training for Autonomous DrivingIn IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2025
S3PT: Scene Semantics and Structure Guided Clustering to Boost Self-Supervised Pre-Training for Autonomous DrivingIn IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2025 -
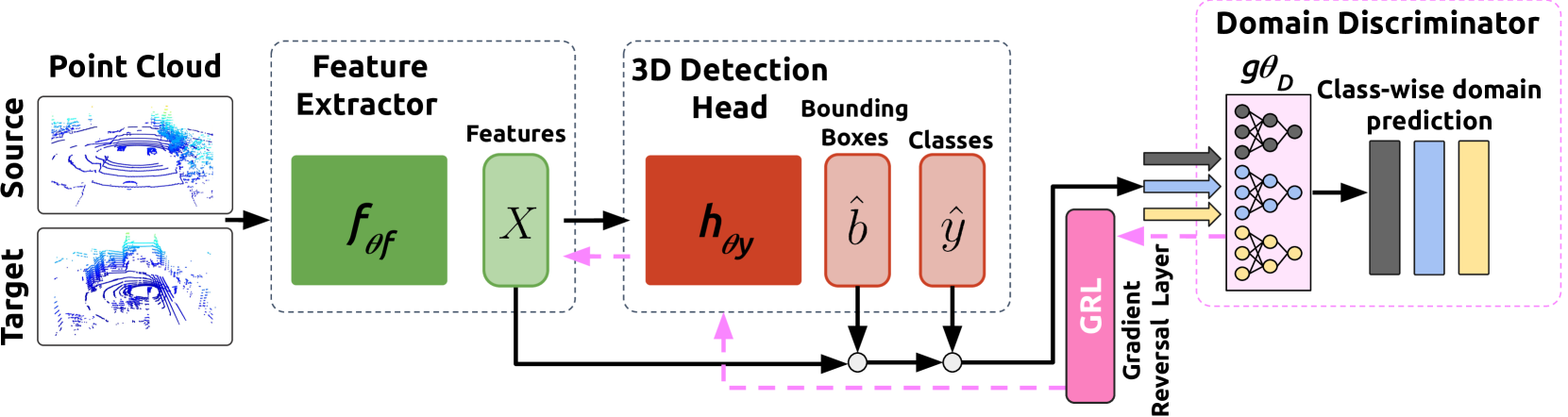 Uada3d: Unsupervised adversarial domain adaptation for 3d object detection with sparse lidar and large domain gapsIEEE Robotics and Automation Letters, 2024
Uada3d: Unsupervised adversarial domain adaptation for 3d object detection with sparse lidar and large domain gapsIEEE Robotics and Automation Letters, 2024 -
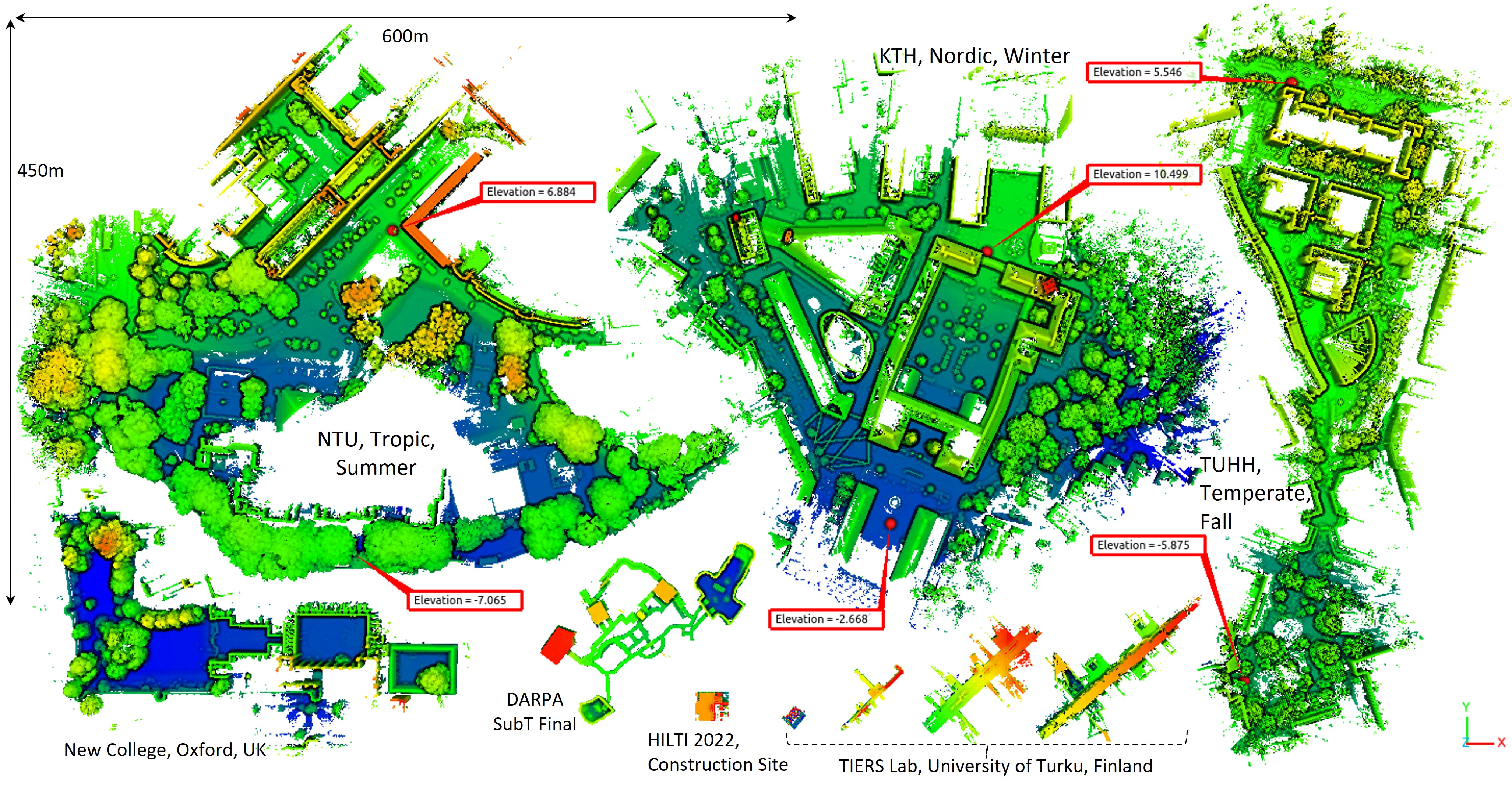 Mcd: Diverse large-scale multi-campus dataset for robot perceptionIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024
Mcd: Diverse large-scale multi-campus dataset for robot perceptionIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024 -
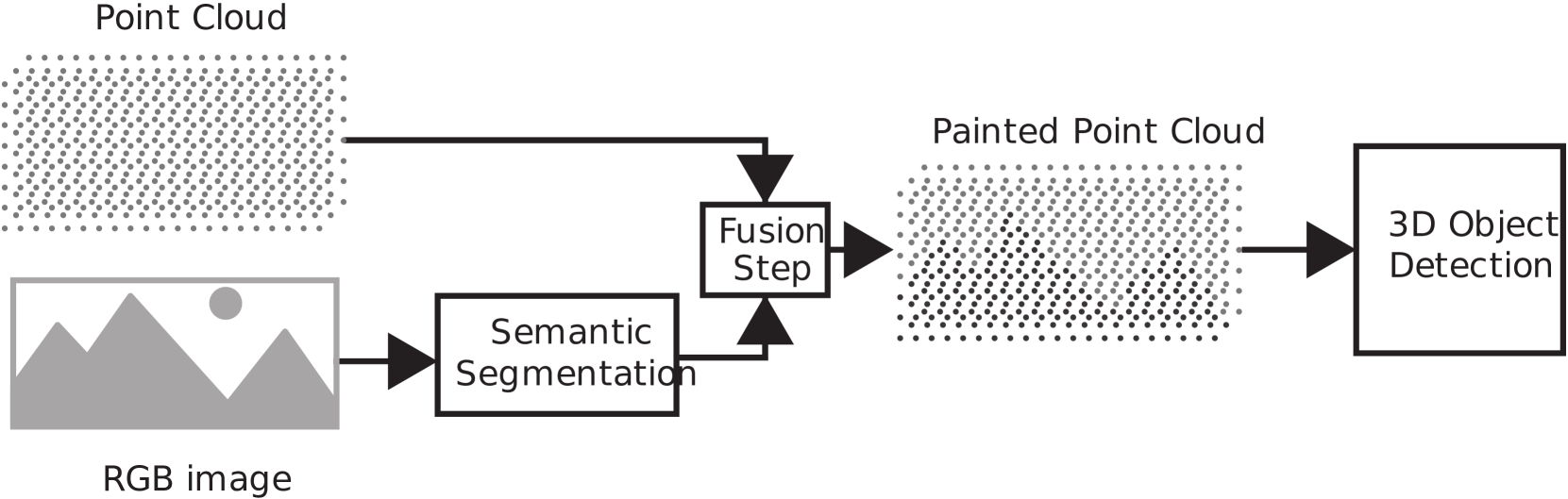 Towards a Robust Sensor Fusion Step for 3D Object Detection on Corrupted DataIEEE Robotics and Automation Letters, 2023
Towards a Robust Sensor Fusion Step for 3D Object Detection on Corrupted DataIEEE Robotics and Automation Letters, 2023 - HumanoidsA Virtual Reality Framework for Human-Robot Collaboration in Cloth FoldingIn 2023 IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023
-
 Happily Error After: Framework Development and User Study for Correcting Robot Perception Errors in Virtual RealityIn IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2023
Happily Error After: Framework Development and User Study for Correcting Robot Perception Errors in Virtual RealityIn IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2023 - ICARSCApplying 3D Object Detection from Self-Driving Cars to Mobile Robots: A Survey and ExperimentsIn 2023 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), 2023
- HRIWhat you see is (not) what you get: A vr framework for correcting robot errorsIn Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 2023
- HRIVirtual, augmented, and mixed reality for human-robot interaction (vam-hri)In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 2023
- ITSCSemantic 3d grid maps for autonomous drivingIn 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022







